
















NEWS CENTER
연구성과와 행사 소식은 물론, 기자와 작가들이 전하는 다채로운 UNIST의 모습을 만나보세요.
뉴스센터

대학뉴스
기계공학과 강상훈 교수, 국제저널 IJPEM ‘최다 피인용 논문상’
로봇 제어 분야 핵심 리뷰 논문
2023~2024년 최다 인용 기록
- 커뮤니티
- 권익만
- 2026.01.07
- 2719

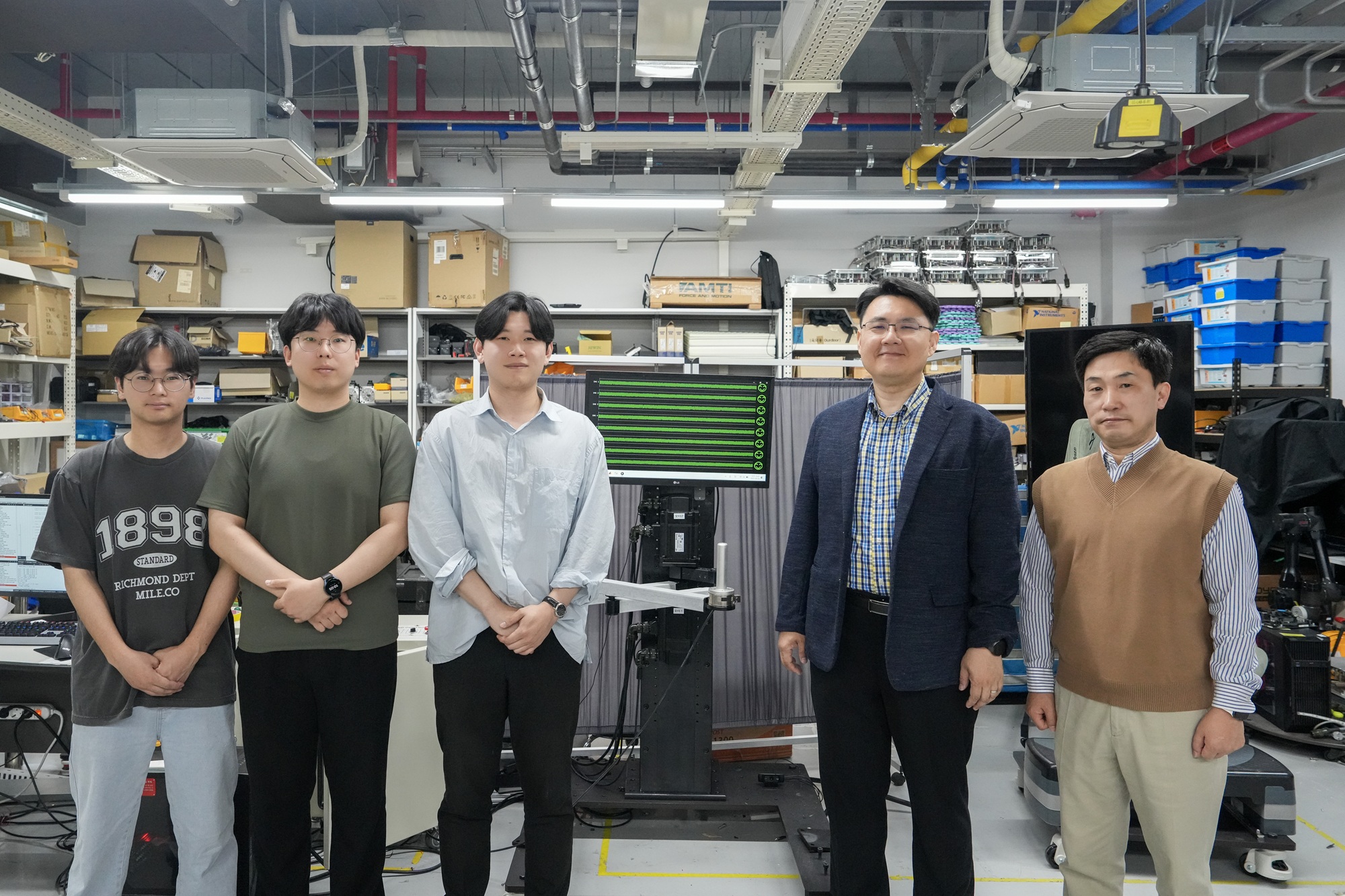
기계공학과 강상훈 교수가 로봇 제어 분야 국제 저널인 International Journal of Precision Engineering and Manufacturing(IJPEM)에서 선정하는 최다 피인용 논문상(Most Cited Article Award)을 받았다.
이번 수상은 IJPEM이 2023~2024년 동안 게재 논문 가운데 가장 많이 인용된 연구를 대상으로 수여했고, 강 교수 논문이 해당 기간 최다 인용 논문으로 꼽히며 학문적 영향력을 공식적으로 인정받았다.
논문은 「A Review on Robust Control of Robot Manipulators for Future Manufacturing」이다. 2023년 IJPEM 제24권 6호에 게재됐다. 로봇 매니퓰레이터의 강인 제어(Robust Control)를 주제로, 특히 시간 지연 제어(Time-Delay Control, TDC) 기법의 이론적 발전과 실제 적용 가능성을 체계적으로 정리했다.
강상훈 교수는 해당 논문에서 지난 30여 년간 축적된 TDC 연구 흐름을 집대성했다. 비선형성과 시변성이 커 제어가 까다로운 휴머노이드 로봇을 비롯해 재활 로봇, 산업용 로봇 등에서도 구조는 단순하면서도 안정적인 제어가 가능함을 종합적으로 제시했다. 이 분야 연구자들이 필요로 했던 체계적 정리가 높은 인용도로 이어졌다는 평가다.
강 교수는 “매우 비선형적이고 복잡한 로봇 시스템에서도 실질적으로 적용 가능한 제어 기법을 정리한 최초의 리뷰 논문이라는 점에서 의미가 크다”며 “많은 연구자들이 TDC에 대한 체계적인 정리를 필요로 했다는 사실이 인용 수로 증명된 것 같아 보람을 느낀다”고 말했다. 이어 “앞으로도 휴머노이드와 재활 로봇 등 다양한 환경에서 활용 가능한 더욱 강건하고 효율적인 제어 기법을 연구해 나가겠다”고 덧붙였다.
Related Links
Related Photo








![[Short news] 유니스트 사람들의 수상, 취임, 미디어 활동 ‘활발’](/app/board/attach/image/thumb_549479_1662952210000.do)